Acquisition System
Table of Contents
Overview
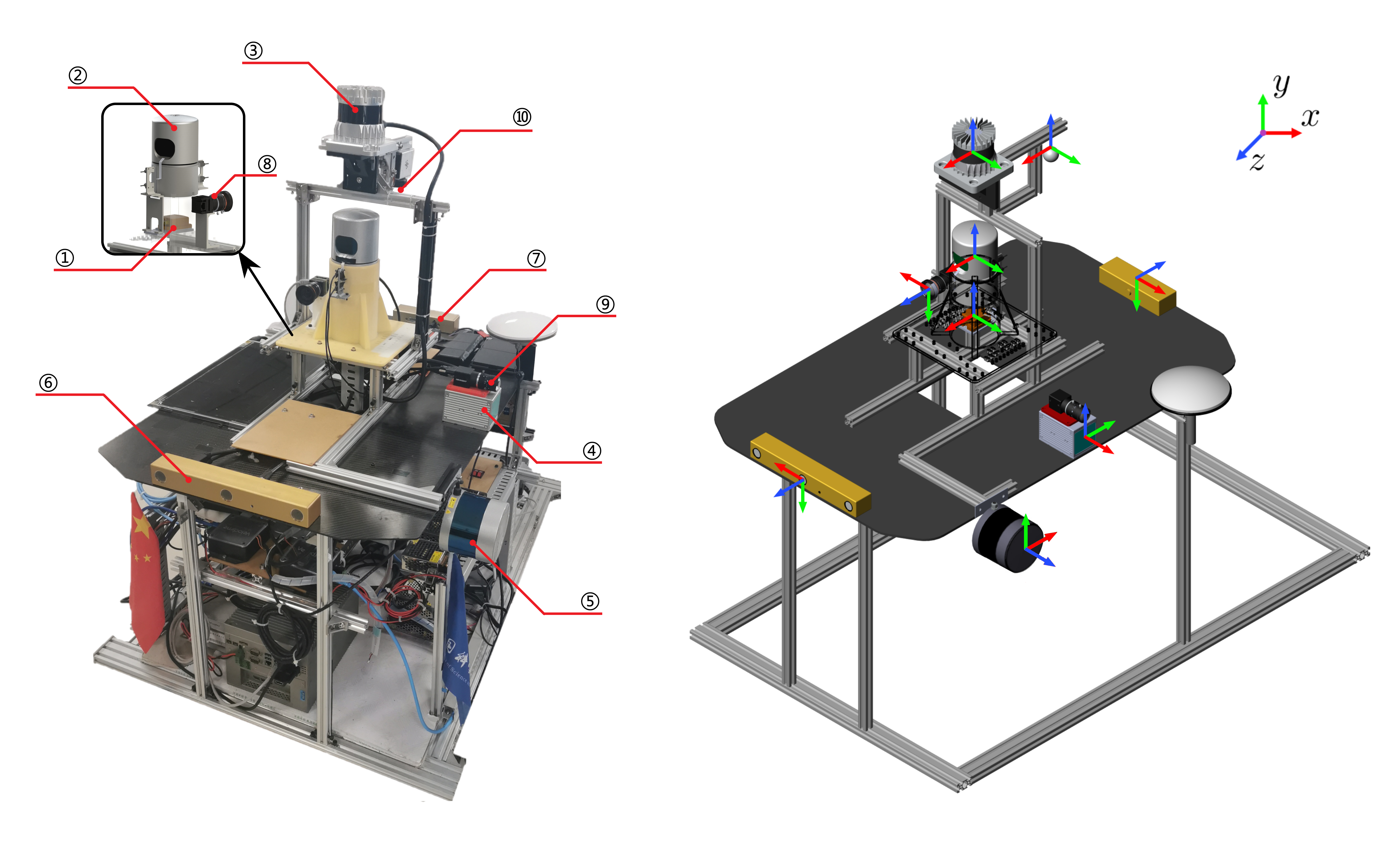
The acquisition system is illustrated in Fig. 1. It consists with three parts: Bucket Truck, Multisensors Platform and Ground Truth System.The bucket truck uses a hydraulic arm to lift the multi-sensor data acquisition system into the air. Well-calibrated and well-synchronized sensors such as cameras, Lidars, and IMUs collect multimodal data of the environment and motion information of the end of hydraulic arm. The laser tracker on the ground tracks the target prism on the motion platform, which provides millimeter-accurate 3D motion trajectories to provide benchmarks for positioning tasks.

Fig 1. "Giraffe" Aerial Acquisition System and "Okapi" Ground Acquisition System. “Giraffe” aerial system: (a), (b) and (c). “Okapi” ground system: (a), (b) and (d) (a) multisensor data collection platform, (b) laser tracker ground truth system, (c) bucket truck, (d) ground robot
Bucket Truck
Bucket Truck is a truck equipped with an extendable, hydraulic boom carrying a large bucket for raising workers to elevated, inaccessible areas. (from 《Webster’s Dictionary》)
According to the official website of Versalift Company, “Bucket trucks are incredibly important to the industries that use them. Because so much of the power grid is connected through overhead means, and it must be managed and maintained, aerial lifts are essential to both the Power Distribution and Power Transmission Industries. Nearly every home and business in the United States is connected to the power grid, and so bucket trucks can be found throughout big cities and small towns, in suburban communities and in business districts. And they are also widely used in Telecommunications, Tree Care, Sign and Lighting Industries etc.”
The hydraulic arm of our bucket truck is produced by Versalift Company, the model is VST-40-I.
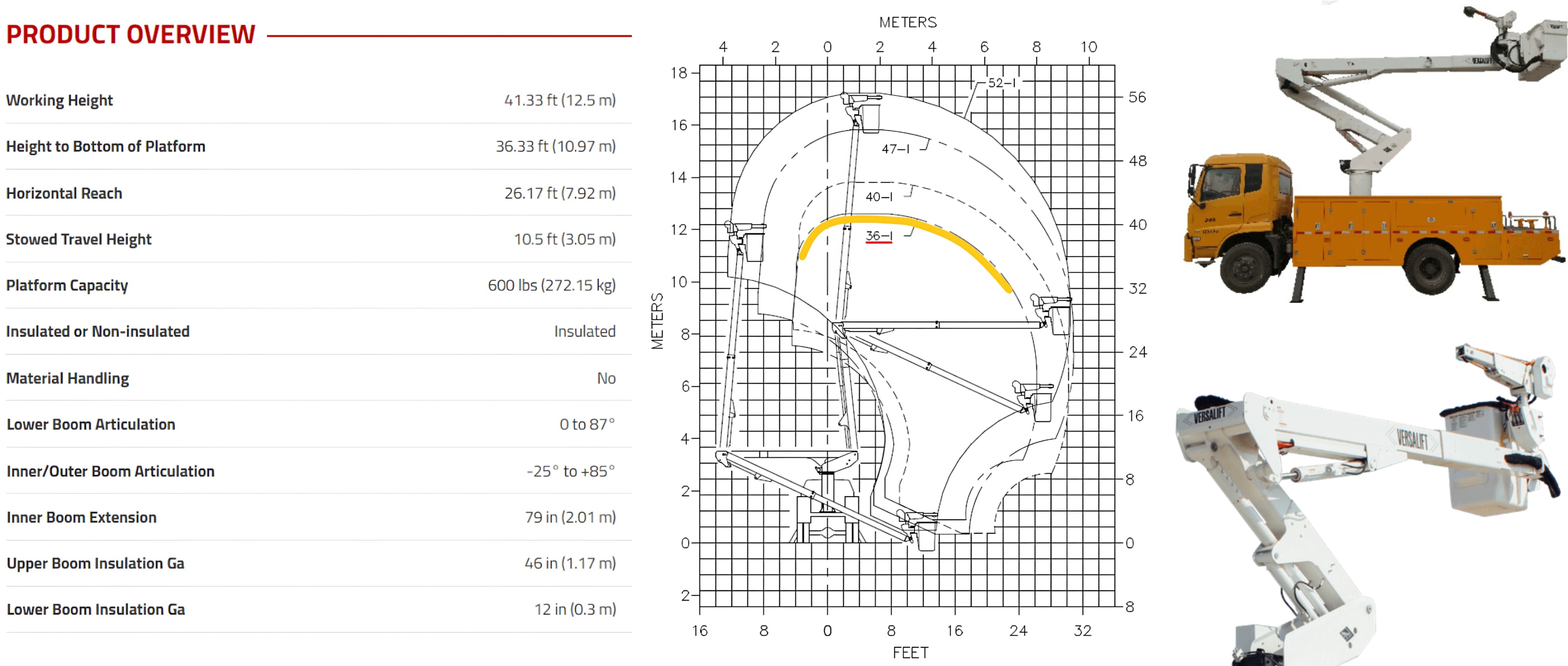 |
Some basic parameters of the Bucket Truck. ① VST-40-I. ② Spec Sheet
.
MultiSensors Platform
|
|






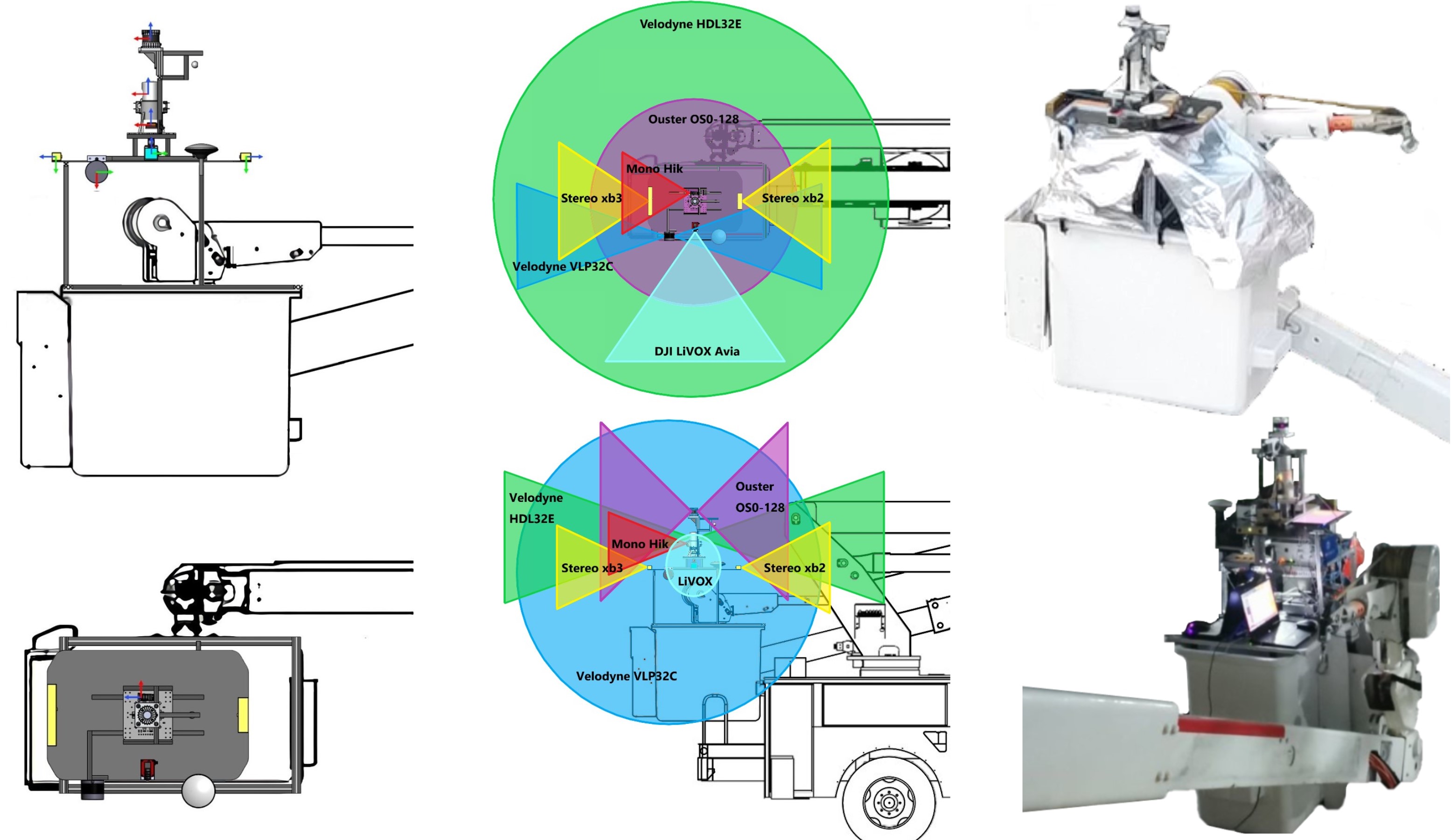 |
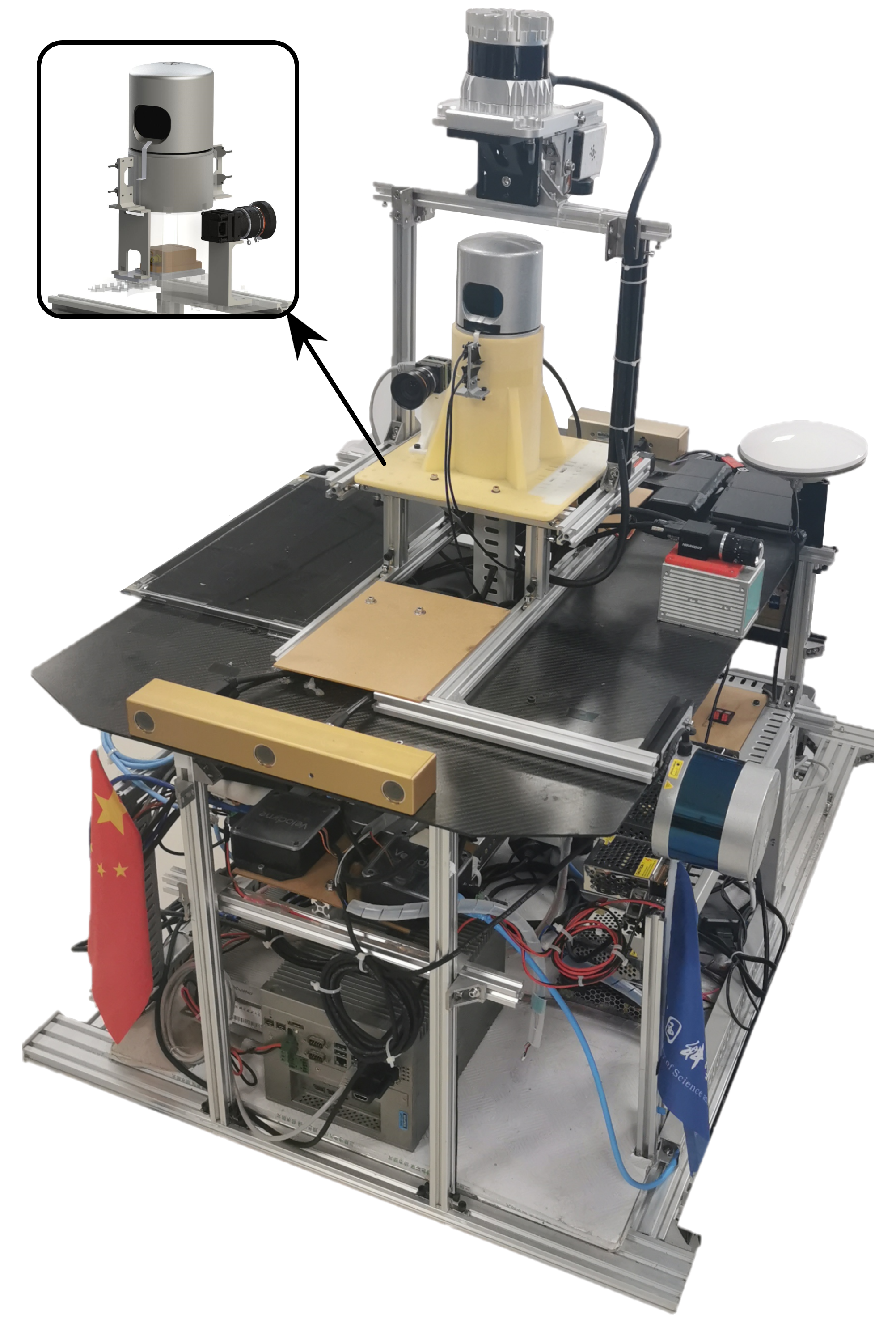
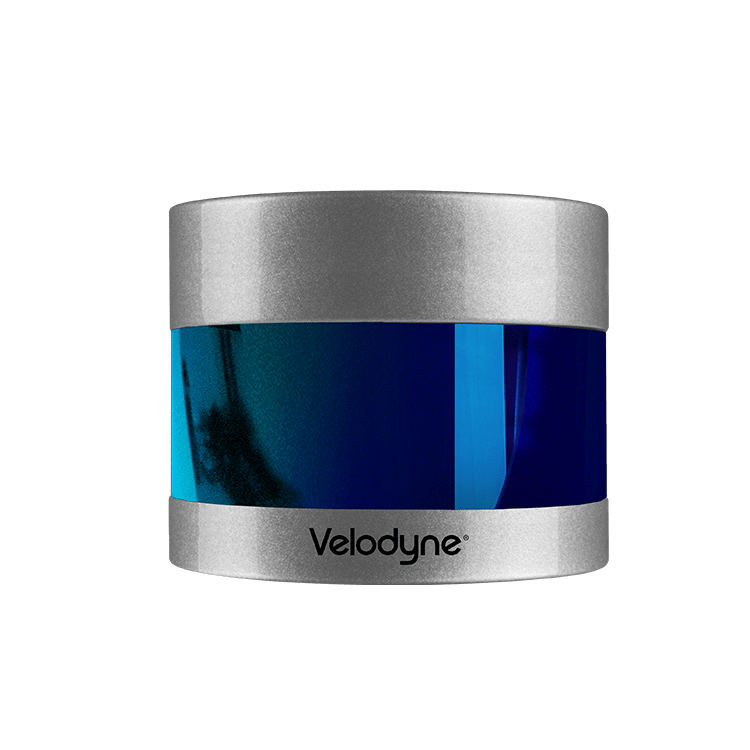
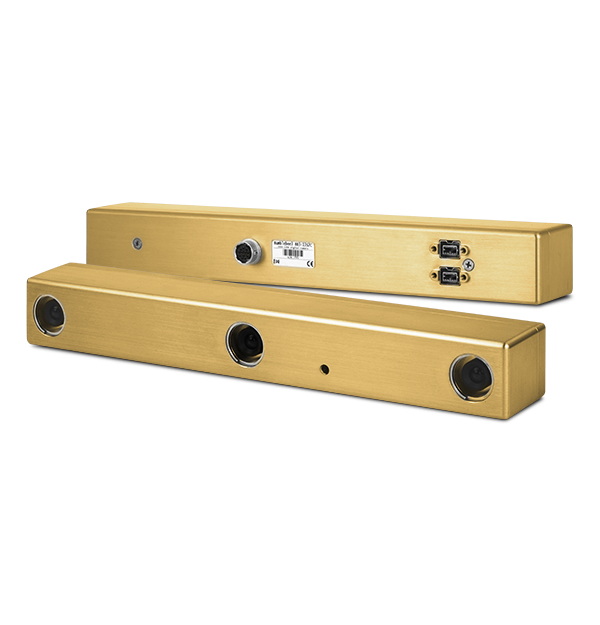
Fig 3. The MultiSensors Platform
Ground Truth Measurement
The API laser tracking system is mounted horizontally on the ground using a tripod. The target ball frame Sball it tracks is rigidly fixed to the body of the sensor platform. The 3D position of the target point trajectory is output at 50Hz (second highest) in the laser tracking frame R. The time tR is referenced to the internal clock of the tracking system.
