USTC FLICAR Dataset
Quick Use
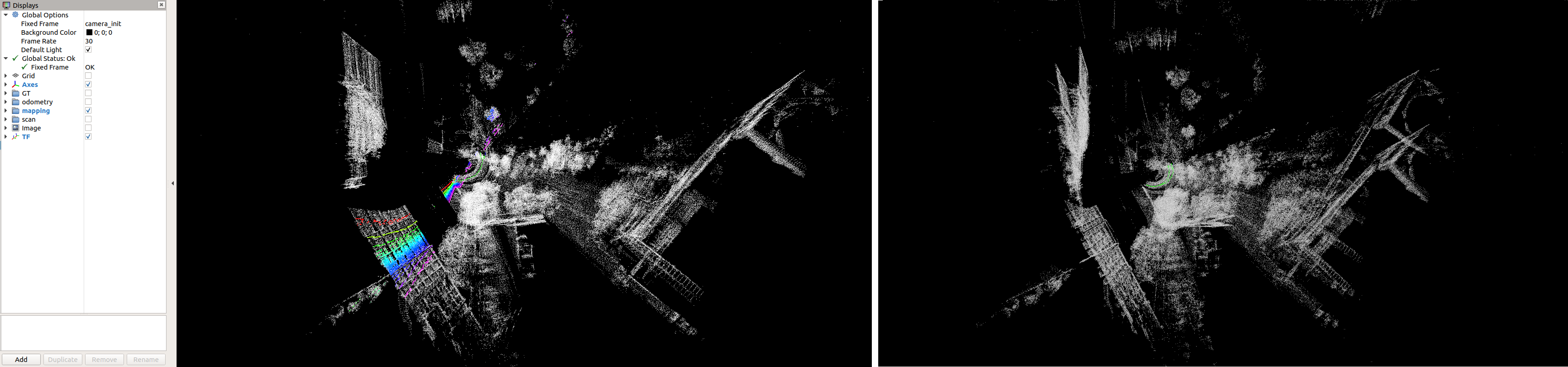
FAST-LIO
FAST-LIO for USTC FLICAR: https://github.com/ustc-flicar/ustcflicar-FAST-LIO
Credit: Forked from https://github.com/hku-mars/FAST_LIO
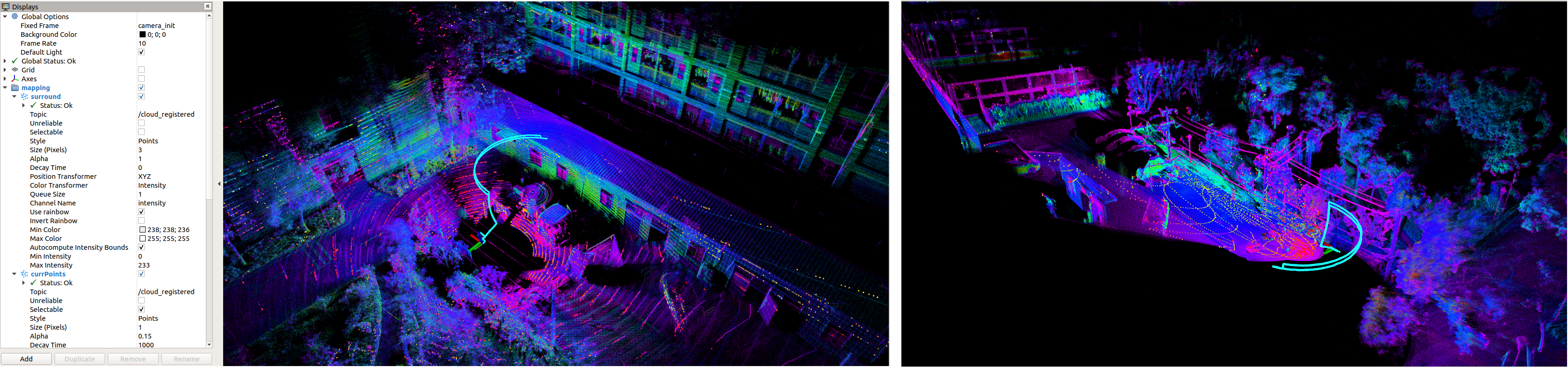
Left:FAST-LIO with Velodyne HDL32E data and Xsens MTi-G-710 data from HF003 sequence
Right: FAST-LIO with LiVOX Avia(Lidar and imu) data from HF003 sequence
VINS-Mono / VINS-Fusion
Note:When we collect data, we start the sensors in order. Before starting a sensor, program need to check whether the previous sensor is working properly. So at the beginning of the rosbag, not all sensors have finished starting. When using a sensor fusion algorithm (such as camera-IMU), you can play rosbag for a period of time (about 10s), and then start the algorithm after all the sensors are started to prevent initialization errors.
VINS-Mono for USTC FLICAR: https://github.com/ustc-flicar/ustcflicar-VINS-Mono
Credit: Forked from https://github.com/HKUST-Aerial-Robotics/VINS-Mono
VINS-Fusion for USTC FLICAR: https://github.com/ustc-flicar/ustcflicar-VINS-Fusion
Credit: Forked from https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
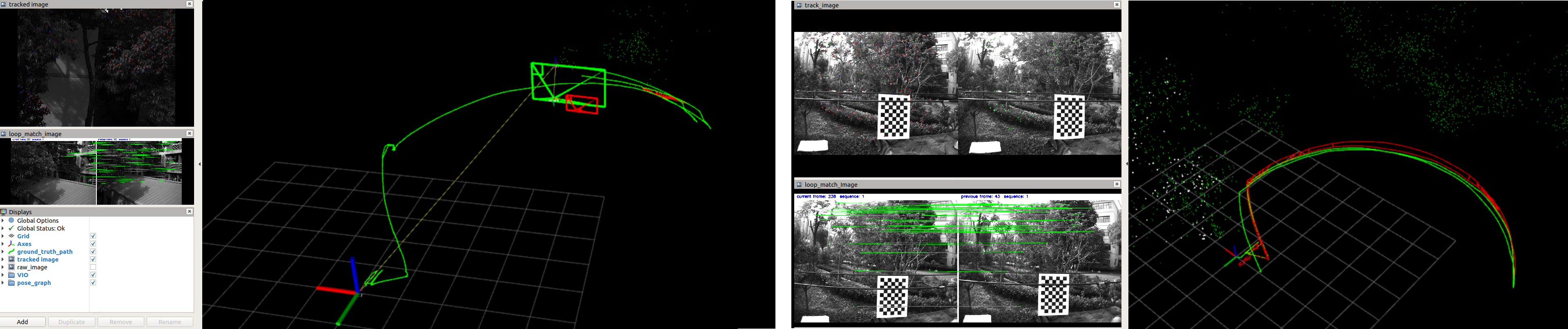
Left:VINS-Mono with Hikvision1 data and Xsens MTi-G-710 data from HF003 sequence
Right: VINS-Fusion with Bumblebee-xb3-Left/Right data and Xsens MTi-G-710 data from HF003 sequence
ORB-SLAM3
Note:We found that different versions of ORB SLAM3 codes have different configuration requirements and operating effects in different system environments. We provide two versions of ORB_SLAM3 codes that adapted to our experimental environment (Ubuntu 18.04, ROS melodic).
ORB-SLAM3 for USTC FLICAR (IMU): https://github.com/ustc-flicar/ustcflicar-ORB-SLAM3-IMU
ORB-SLAM3 for USTC FLICAR (no IMU): https://github.com/ustc-flicar/ustcflicar-ORB-SLAM3-no-IMU
Credit: Forked from https://github.com/UZ-SLAMLab/ORB_SLAM3
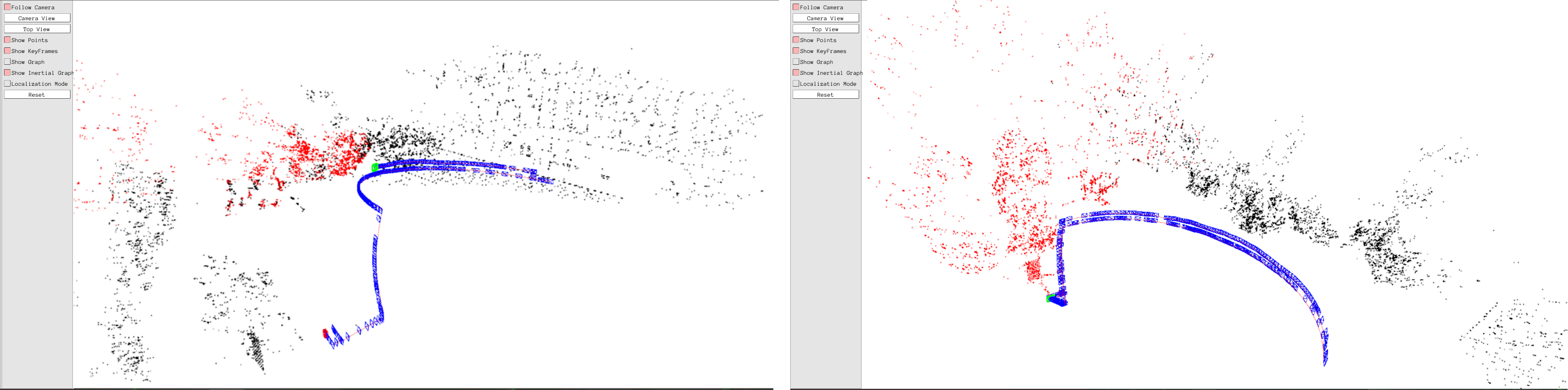
ORB-SLAM3 with Hikvision1 data and Xsens MTi-G-710 data from HF003 sequence
A-LOAM
A-LOAM for USTC FLICAR: https://github.com/ustc-flicar/ustcflicar-A-LOAM
Credit: Forked from https://github.com/HKUST-Aerial-Robotics/A-LOAM
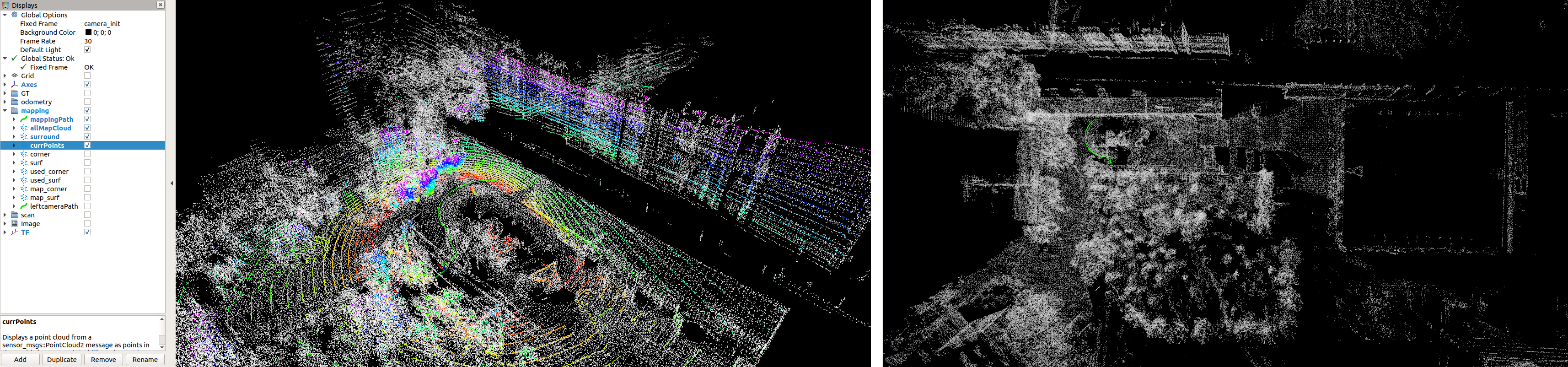
A-LOAM with horizontal Velodyne HDL-32E data from HF003 sequence
A-LOAM with vertical Velodyne VLP-32C data from HF003 sequence
LeGO-LOAM
LeGO-LOAM for USTC FLICAR: https://github.com/ustc-flicar/ustcflicar-LeGO-LOAM
Credit: Forked from https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
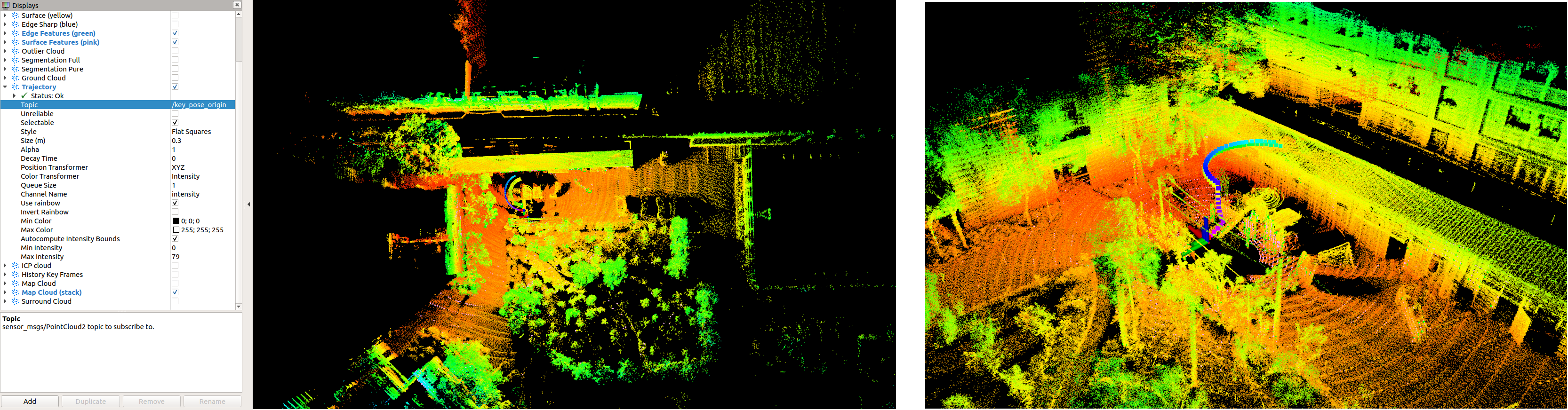
LeGO-LOAM with horizontal Velodyne HDL-32E data from HF003 sequence
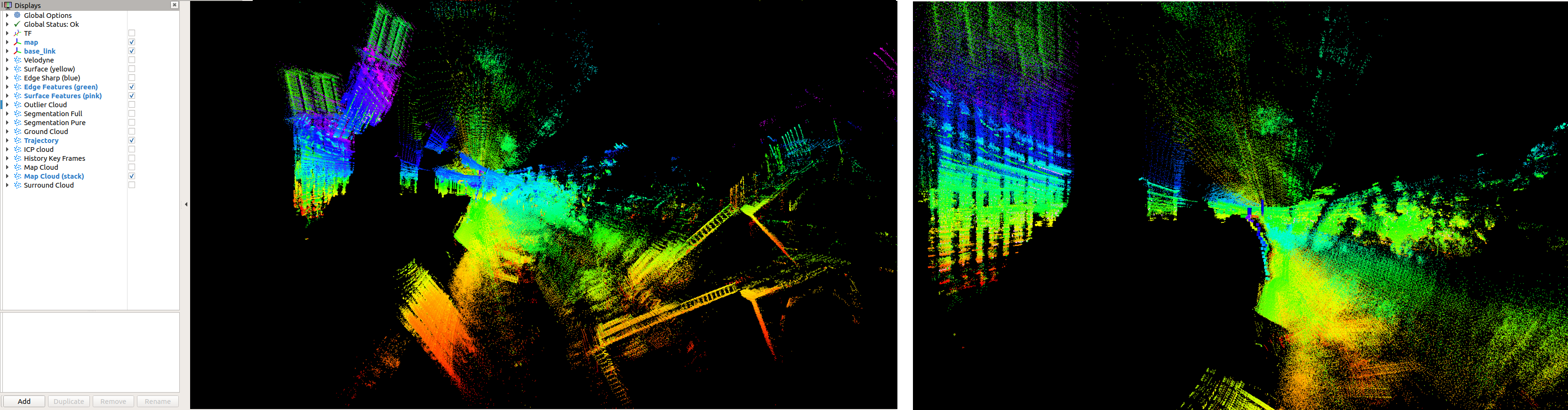
LeGO-LOAM with vertical Velodyne VLP-32C data from HF003 sequence
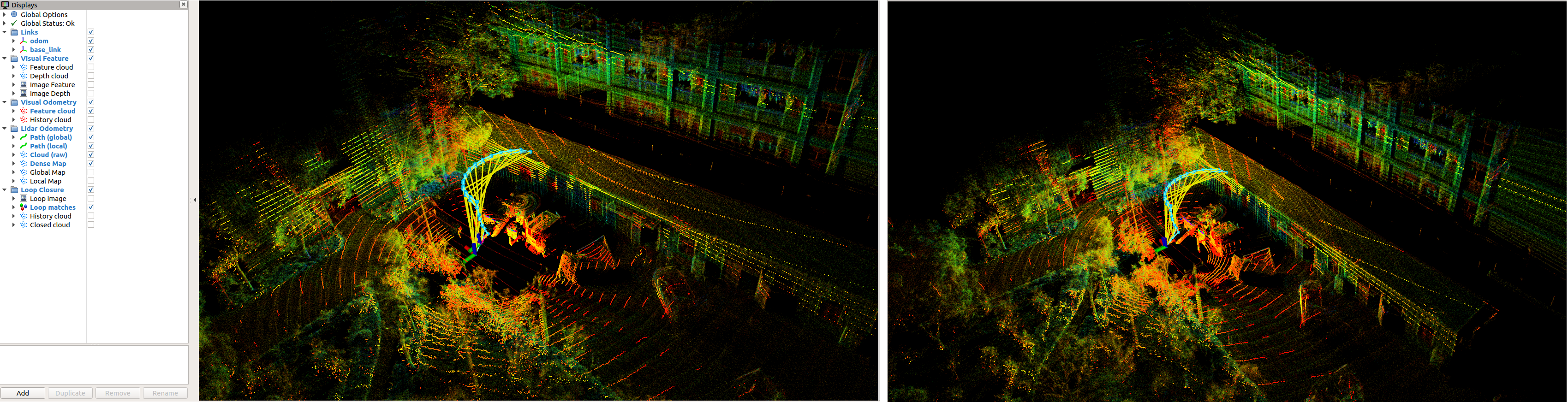
LIO-SAM
LIO-SAM for USTC FLICAR: https://github.com/ustc-flicar/ustcflicar-LIO-SAM
Credit: Forked from https://github.com/TixiaoShan/LIO-SAM
Evaluation:EVO
EVO Tools:https://github.com/MichaelGrupp/evo
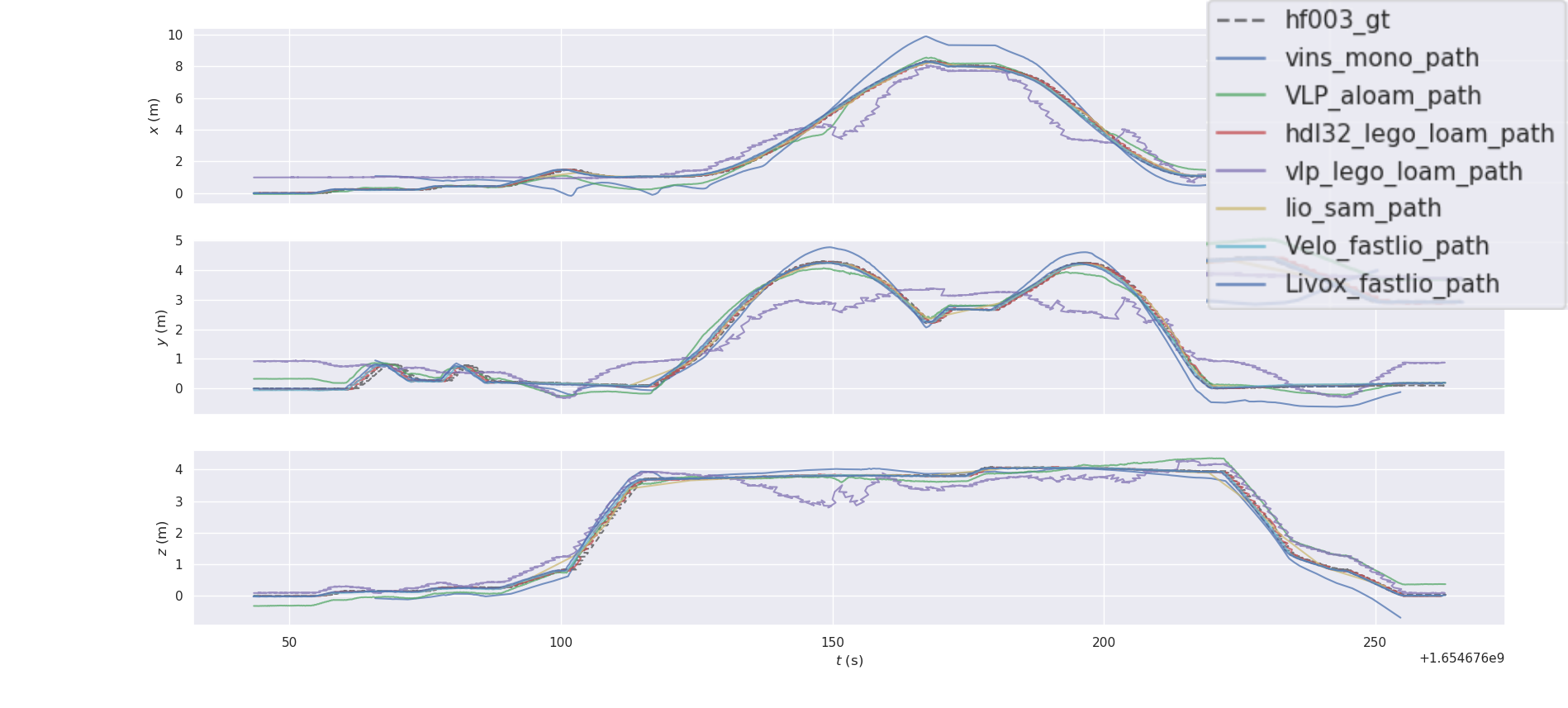
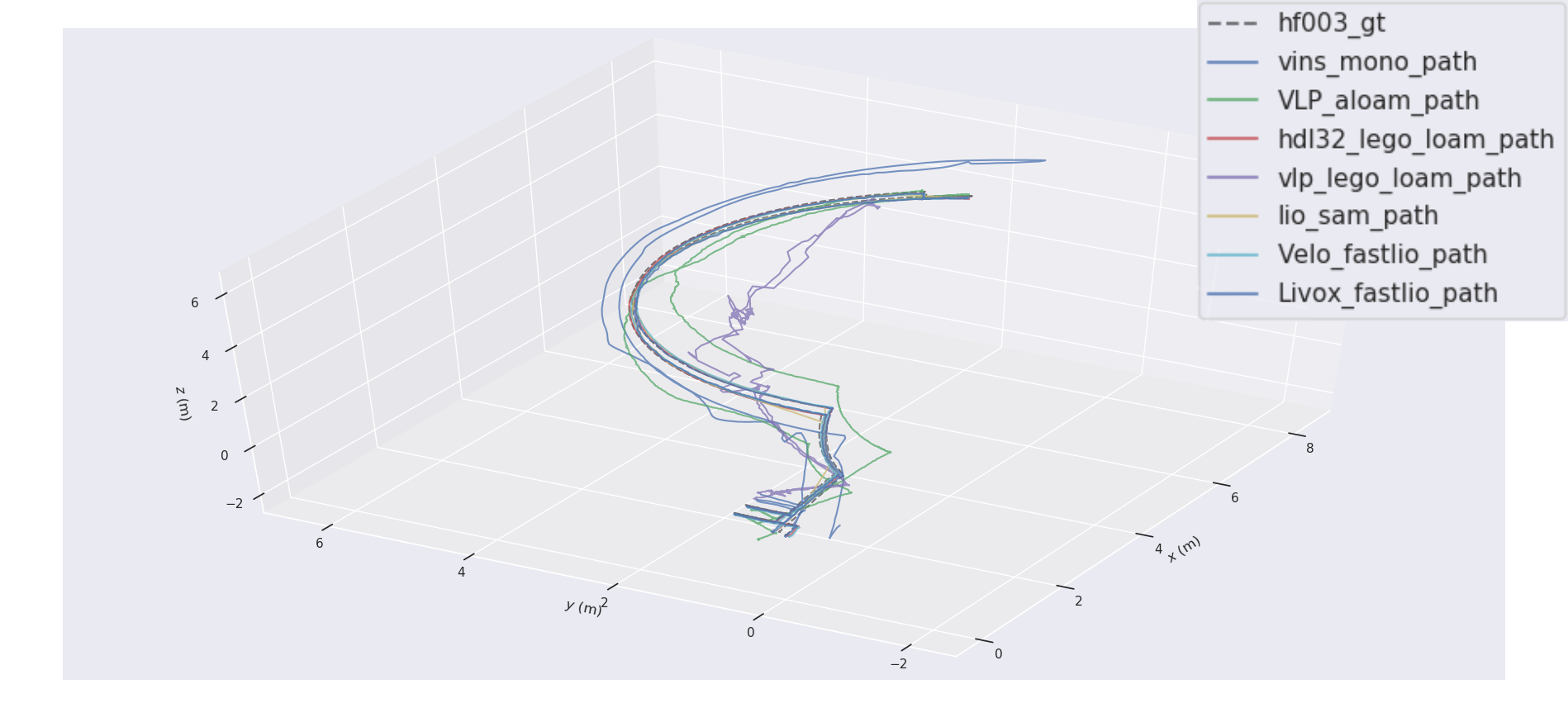
Overview